Vier Partner des „Reallabors Deutschland“ des EU-Projekts PoDIUM haben im Rahmen einer Veranstaltung die reibungslose Koordination von automatisierten Fahrzeugen in komplexen Verkehrssituationen demonstriert.
Die Aufgabenstellung der Live-Demo: Auf einer zweispurigen Straße mit Gegenverkehr ist eine Fahrspur durch ein stehendes Fahrzeug blockiert. Zwei automatisierte Fahrzeuge müssen das Hindernis in einem kooperativen Manöver umfahren. Damit der Verkehr auch auf der blockierten Spur fließen kann, muss das entgegenkommende, eigentlich vorfahrtsberechtigte Fahrzeug auf der freien Spur dem Fahrzeug hinter der Blockade die Vorfahrt gewähren.
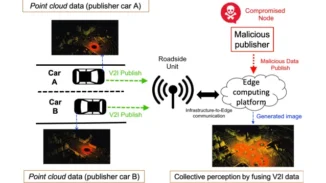
Für erste Versuche nutzen die Forschenden nicht nur die Sensordaten der automatisierten Fahrzeuge, sondern auch die der Verkehrsinfrastruktur. Dazu wurden die Lichtmasten einer Testkreuzung mit Sensoren und Kameras ausgestattet. Über Funk haben die Fahrzeuge nicht nur Zugriff auf die Daten, sondern auch auf eine Recheneinheit, die bei der Erstellung des Umgebungsmodells unterstützt und das kooperative Verhalten aktiv steuert.
Für die Datenübertragung wurde sowohl Mobilfunk als auch ein spezielles WLAN genutzt. Bei dem WLAN-Netz handelte es sich um eine gemeinsam von der Universität Ulm und der Universität Duisburg-Essen (UDE) entwickelte WLAN-Pilotanlage für ein 60-GHz-Netz. Beim Mobilfunk setzten die Forschenden sowohl auf Standard-5G-Mobilfunk (cm-Wave) als auch auf die schnellere 5G-Variante (mm-Wave).
Ein von Bosch im Projekt entwickelter Kooperationsplaner plant das kooperative Fahrmanöver auf dem Server und weist die beteiligten Fahrzeuge entsprechend an.
Im Projekt und auf der von vier Partnern des Reallabor Deutschland (Universität Ulm, Universität Duisburg-Essen, Bosch, Nokia) organisierten Veranstaltung konnte gezeigt werden, dass eine solche kooperative Manöverplanung auf dem Server sogar nur mit den Sensordaten der Fahrzeuge realisierbar ist, ohne dass die Infrastruktur aufwändig umgerüstet werden muss.
Die Ergebnisse des Reallabor Deutschland werden in die weitere Forschung zur Optimierung vernetzter, kooperativer und automatisierter Mobilität (CCAM) einfließen. Das Projekt PoDIUM läuft noch bis September 2025. (jr)