")
Foretellix has introduced Foretify, a specialized toolchain for the data-driven development of autonomous vehicles. The aim is to train, validate and safeguard AI-supported AV stacks more efficiently. Foretify automates the selection and processing of relevant driving data and supplements it with synthetically generated scenarios. The platform also integrates extensive sensor simulation data, which is enriched with realistic variations from NVIDIA Omniverse and Cosmos.
The increasing system complexity in autonomous vehicles – for example due to changing environmental conditions, unpredictable behavior of other road users or emergency situations – presents developers with major challenges. The validation of these systems in particular is extremely complex due to the large number of possible scenarios. Foretellix meets this challenge with a comprehensive, modular toolchain that analyzes real driving data and supplements it with augmented and synthetically generated scenarios.
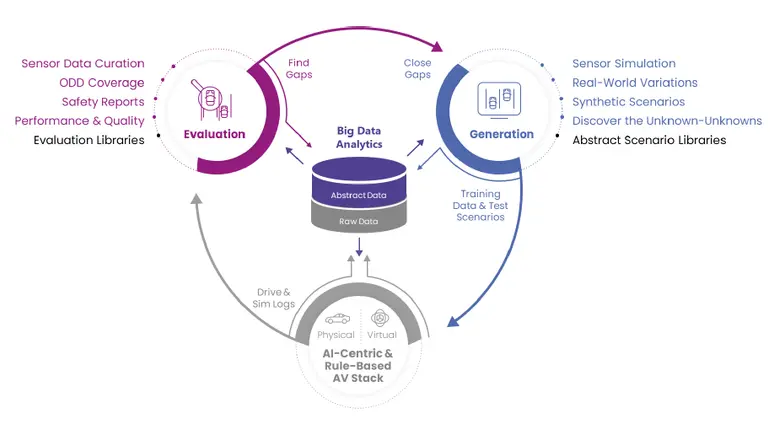
Foretellix’s automated toolchain supports AI training, validation and safety assessment of autonomous vehicles – data-driven, scalable and efficient. (© Foretellix)
The focus is on supporting the transition to so-called physical AI approaches, in which autonomous vehicles increasingly use end-to-end neural networks instead of the modular software architectures that have been common up to now. A particular focus of the company’s Foretify tool is the independent evaluation of AI-based driving functions: The solution enables an objective safety analysis, which is not only important for developers, but also for operators, suppliers, test centers and insurers. This enables regulatory requirements to be met and risks to be identified at an early stage. Ziv Binyamini, CEO and co-founder of Foretellix, explained: „Training, validating and proving the safety of autonomous systems are the key drivers of progress in this industry. Foretellix’s solution helps to foster innovation and lower the barriers to entry for AV developers, vehicle manufacturers and entrepreneurs to democratize the path to driverless autonomy.“
The challenge of physical AI
The possibilities of physical AI offer development teams of autonomous vehicles new opportunities to accelerate the path to full autonomy. However, several challenges need to be overcome in order to efficiently utilize the potential of current AI technologies. Firstly, existing driving data must be used optimally and supplemented with synthetically generated, hyper-realistic data in order to train AI models effectively. In addition, the limited predictability of AI-controlled systems makes safe implementation difficult – comprehensive validation of the entire AV stack under realistic conditions is therefore essential. Finally, the industry, from fleet operators to developers and insurers, needs an independent, data-driven evaluation framework to objectively and comprehensibly assess the safety of autonomous vehicles before they are used in public spaces.
The Foretify tool trains AI-supported AV stacks by automatically curating training data from real trips and supplementing it with generated synthetic scenarios. The toolchain also provides a wide range of sensor simulation data enriched with realistic variations from NVIDIA Omniverse and Cosmos. The AI-powered AV stack is validated by generating large amounts of realistic synthetic data. This greatly increases the efficiency of achieving an optimal level of operational reliability within a defined Operational Design Domain (ODD). In addition, Foretify uses a data-driven safety assessment framework to analyze the performance of real and simulated driving data and measure coverage. This provides independent evidence of the safety of the system.
Foretify recently expanded its integration with the NVIDIA Omniverse Blueprint for autonomous vehicle simulation, including the NVIDIA Cosmos Transfer World Foundation model and video data-based search. These newly announced features are based on physics insights and enhance the Foretify platform’s behavior-driven scenario generation with greater diversity in terms of weather, lighting and geolocation. Foretellix has also added new features to its platform to enable even more targeted analysis of autonomous vehicle behavior. This is made possible by the integration of Cosmos search functions, which are specifically geared towards sensor data. These enhancements support the AI-based training and validation of autonomous vehicles – and thus contribute to faster development and market readiness.

Ziv Binyamini is considered one of the thought leaders in verification technology. Prior to his role at Foretellix, he was Corporate Vice President at Cadence, where he was responsible for the global simulation and verification solutions business. During his career at Cadence, Verisity and Intel, he was instrumental in driving the development of advanced verification methodologies – including the introduction of the first coverage-driven verification approaches and market-defining tools such as Specman for chip-level verification and Perspec for SoC-level HW/SW verification.
The Foretellix Foretify/NVIDIA integration was awarded the „Simulation Innovation of the Year“ prize at the Automotive Testing Technology International Awards 2025. (oe)


