Die Anwendungsstory von dSPACE zeigt exemplarisch, wie sich die Validierung moderner ADAS- und Automated-Driving-Systeme von klassischen Steuergerätetests hin zu einer durchgängigen, domänenübergreifenden Systemabsicherung entwickelt. Gemeinsam mit General Motors hat dSPACE eine Hardware-in-the-loop-(HIL)-Architektur aufgebaut, die Sensorik, Fahrzeugdynamik, Netzwerkkommunikation und reale Aktuatoren in einer geschlossenen Simulationsumgebung zusammenführt.
Im Zentrum steht die Absicherung eines Level-2+-Systems der neuen GM-Fahrzeugplattform, unter anderem für den Cadillac Vistiq. Die Komplexität ist erheblich: Elf Kameras, sechs Radarsensoren und ein Lidar liefern Umfelddaten, die in Echtzeit verarbeitet und in Fahrentscheidungen umgesetzt werden müssen. Gleichzeitig müssen Brems- und Lenksysteme deterministisch und sicher reagieren. Genau hier setzt der domänenübergreifende HIL-Ansatz an.
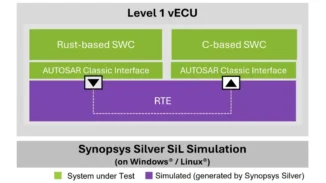
Technisch interessant ist insbesondere die Kombination aus virtueller Sensorwelt und realer Hardware. Während die ASM-Toolkette Verkehr, Fahrzeugdynamik und Szenarien simuliert, erzeugt die GPU-basierte Plattform AURELION physikalisch realistische Kamera-, Radar- und Lidar-Daten. Die Sensordaten werden anschließend über FPGA-basierte ESI-Units zeit- und bitgenau an die Steuergeräte übertragen. Dadurch lassen sich Wahrnehmungsalgorithmen unter nahezu fahrzeugidentischen Bedingungen validieren – einschließlich proprietärer Schnittstellen wie GMSL oder FPD-Link.
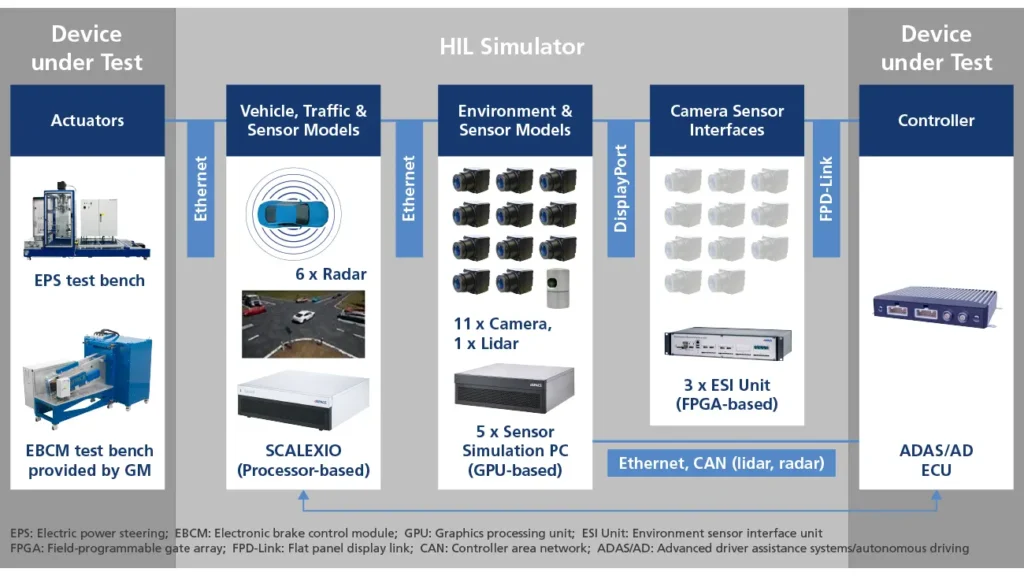
Prinzip des HIL-Aufbaus, der Fahrzeugsensoren (Kameras, Lidar, Radar), Aktoren (Lenkung, Bremsen) und die ADAS-Steuereinheit in einer geschlossenen Regelkreisumgebung integriert. (© dSPACE)
Bemerkenswert ist zudem die Integration realer mechatronischer Systeme in den Prüfstand. Elektrische Servolenkungen und Bremssysteme werden direkt in die geschlossene Regelkette eingebunden. Damit validiert GM nicht nur Softwarefunktionen, sondern auch physikalische Effekte wie Aktuatordynamik, Lastverhalten oder sicherheitskritische Fallback-Strategien. Genau dieser Übergang von reiner ECU-Validierung hin zu physikalischer Systemvalidierung gilt derzeit als einer der entscheidenden Entwicklungsschritte im Automotive-Testing.
Die Story verdeutlicht außerdem, wie stark der Entwicklungsaufwand durch die steigende Zahl möglicher Verkehrssituationen wächst. Klassische Straßentests reichen dafür längst nicht mehr aus. dSPACE adressiert dies mit skalierbaren, reproduzierbaren Szenariosimulationen inklusive Randfällen, Fehlern und Degradationszuständen. Damit wird die virtuelle Absicherung zunehmend zu einem zentralen Baustein für die Homologation und Serienfreigabe automatisierter Fahrfunktionen. (oe)