In einem Blog stellt dSPACE einen erweiterten Ansatz für die Absicherung von Fahrerassistenzsystemen und automatisierten Fahrfunktionen vor. Im Fokus steht die Transformation aufgezeichneter Sensordaten in editierbare digitale Zwillinge von Fahrszenarien. Dieser Ansatz gehe über klassische Data-Replay-Verfahren hinaus und ermöglicht eine skalierbare Generierung neuer Testszenarien, so die drei Autoren dieses Beitrags.
Kern der vorgestellten Lösung ist die Integration neuronaler Rekonstruktionsverfahren in die dSPACE Automotive Simulation Models (ASM). In diesem Kontext werden die Bibliotheken von NVIDIA Omniverse NuRec eingebunden, welche Sensordaten in dreidimensionale, dynamische Szenen überführen. Technologische Grundlage ist unter anderem 3D Gaussian Splatting, ein Verfahren, das eine realitätsnahe und zugleich echtzeitfähige Darstellung komplexer Umgebungen erlaubt.
Auf Basis dieser rekonstruierten digitalen Zwillinge lassen sich dann Fahrszenarien gezielt variieren. Entwickler können Parameter wie Fahrtrajektorien, Kamerakonfigurationen oder Verkehrssituationen anpassen und so neue Randfälle erzeugen, die in realen Testfahrten nicht oder nur schwer erfassbar sind. Dies erhöht die Testabdeckung erheblich und unterstützt die systematische Absicherung moderner Fahrfunktionen.
Auch bleiben deterministische und reproduzierbare Tests möglich, während gleichzeitig die Realitätsnähe durch die Nutzung echter Sensordaten gesteigert wird. Die Echtzeitfähigkeit der Rekonstruktionsverfahren ermöglicht zudem den Einsatz in geschlossenen Simulationskreisläufen, etwa in Hardware-in-the-Loop-Anwendungen.
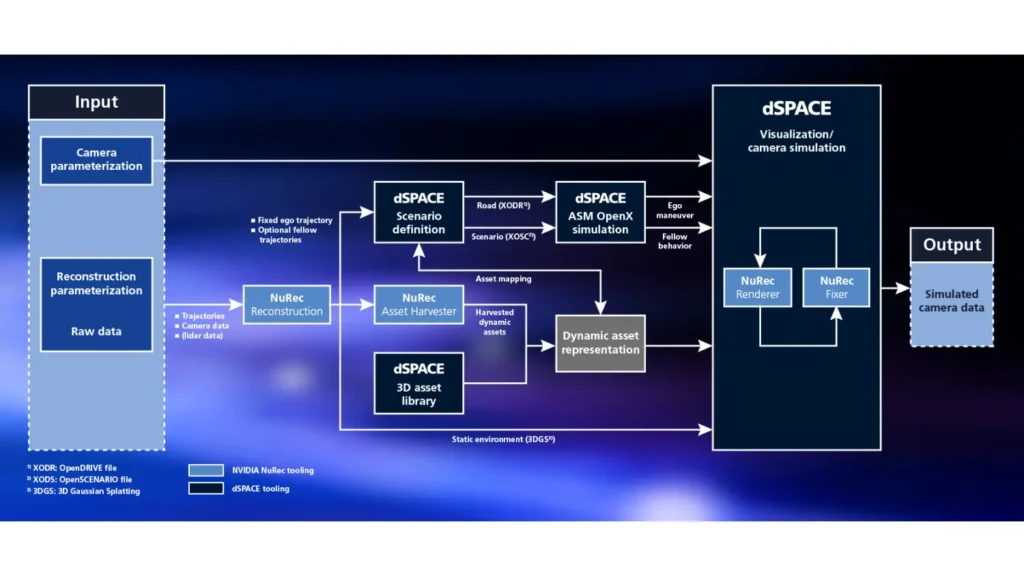
Kameraparametrierung und aufbereitete Sensor-Rohdaten dienen als Eingabe für die NuRec-Pipeline zur Erzeugung eines digitalen Zwillings, der um zusätzliche 3D-Objekte aus der dSPACE-Bibliothek erweitert werden kann. (© dSPACE)
Zwar bietet NVIDIA Omniverse NuRec bereits Unterstützung für Lidar-Simulationen, doch konzentriert sich der in diesem Blogbeitrag vorgestellte Arbeitsablauf in erster Linie auf kamerabasierte Anwendungsfälle. Da moderne Fahrfunktionen zudem in hohem Maße auf Radar und Lidar angewiesen sind, wird die Integration dieser Sensoren entscheidend sein, um die Anwendungsmöglichkeiten dieses Simulationsansatzes weiter auszubauen, so die Autoren. (oe)