Toyota setzt bei der Validierung von Fahrerassistenzsystemen auf einen durchgängigen Prozess, der mit dSPACE-Tools reale Messungen und virtuelle Testumgebungen verbindet. Dadurch entstehen präzise und reproduzierbare Testszenarien, die eine Absicherung nach dem SOTIF-Ansatz (ISO 21448) ermöglichen.
Durch die gezielte Generierung kritischer Fahrsituationen lassen sich potenziell unsichere Szenarien frühzeitig erkennen und systematisch prüfen. Auf diese Weise konnten die Entwickler Schwachstellen identifizieren und Risiken für andere Verkehrsteilnehmer minimieren.
Der Bericht beschreibt, wie auf Basis umfangreicher Messfahrten Verkehrsdaten mit dem dSPACE Tool AUTERA aufgezeichnet, anschließend KI-gestützt verarbeitet und mit dem Traffic Virtualizer in simulationsfähige Szenarien überführt wurden. Diese können sowohl reale Situationen exakt abbilden als auch in variierter Form eingesetzt werden, um Corner Cases gezielt zu untersuchen. Die so erzeugten Szenarien kommen im ADAS Real Car Simulator zum Einsatz, der reale Fahrzeuge mit virtuellen Umgebungen koppelt. Dadurch lassen sich auch kritische Verkehrssituationen ohne Risiko prüfen und Systeme unter schwierigen Bedingungen validieren.
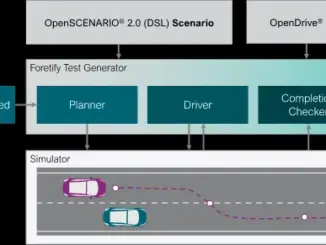
Daiki Miyata, der bei Toyota Motor Corporation in der Abteilung für die Entwicklung von Fahrzeugtechnologien und der Innovationsabteilung für die XILS-Entwicklung arbeitet, erläutert im Beitrag, wie reale Verkehrsströme präzise erfasst, Straßendetails und Fahrzeuge mithilfe von understand.ai-Tools annotiert und logische Szenarien aus den Daten erstellt wurden. Über OpenX-Standards wie OpenDRIVE und OpenSCENARIO erfolgte die nahtlose Integration in die virtuelle Testumgebung.
Toyota plant, die Simulationsumgebungen weiter auszubauen, um komplexe Verkehrssituationen noch realistischer abzubilden und die sichere Einführung automatisierter Fahrsysteme zu beschleunigen. (oe)