")
Foretellix hat mit Foretify eine spezialisierte Toolchain für die datengetriebene Entwicklung autonomer Fahrzeuge vorgestellt. Ziel ist es, KI-gestützte AV-Stacks effizienter zu trainieren, validieren und abzusichern. Foretify automatisiert die Auswahl und Aufbereitung relevanter Fahrdaten und ergänzt sie gezielt durch synthetisch generierte Szenarien. Die Plattform integriert zudem umfangreiche Sensorsimulationsdaten, die mit realitätsnahen Variationen aus NVIDIA Omniverse und Cosmos angereichert werden.
Die zunehmende Systemkomplexität in autonomen Fahrzeugen – etwa durch wechselnde Umgebungsbedingungen, unvorhersehbares Verhalten anderer Verkehrsteilnehmer oder Notfallsituationen – stellt Entwickler vor große Herausforderungen. Insbesondere die Validierung dieser Systeme wird durch die Vielzahl möglicher Szenarien extrem aufwendig. Foretellix begegnet dieser Herausforderung mit einer umfassenden, modular aufgebauten Toolchain, die reale Fahrdaten analysiert und durch augmentierte sowie synthetisch erzeugte Szenarien ergänzt.
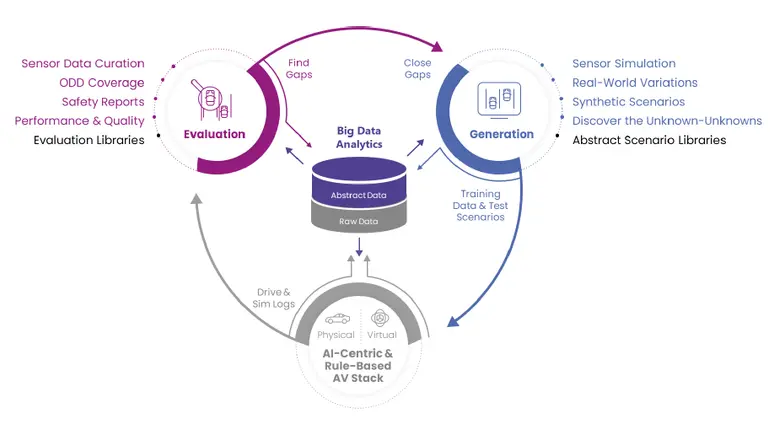
Die automatisierte Toolchain von Foretellix unterstützt KI-Training, Validierung und Sicherheitsbewertung autonomer Fahrzeuge – datengetrieben, skalierbar und effizient. (© Foretellix)
Im Zentrum steht die Begleitung des Übergangs zu sogenannten Physical-AI-Ansätzen, bei denen autonome Fahrzeuge verstärkt durchgängige neuronale Netze einsetzen, anstelle der bisher üblichen, modular aufgebauten Softwarearchitekturen. Ein besonderer Fokus des Tools Foretify des Unternehmens liegt auf der unabhängigen Bewertung von KI-basierten Fahrfunktionen: Die Lösung ermöglicht eine objektive Sicherheitsanalyse, die nicht nur für Entwickler, sondern auch für Betreiber, Zulieferer, Prüfstellen und Versicherer von Bedeutung ist. So lassen sich regulatorische Anforderungen erfüllen und Risiken frühzeitig erkennen. Ziv Binyamini, CEO und Mitgründer von Foretellix, erklärte: „Training, Validierung und Nachweis der Sicherheit autonomer Systeme sind die wichtigsten Triebkräfte für den Fortschritt dieser Industrie. Die Lösung von Foretellix trägt dazu bei, Innovationen zu fördern und die Einstiegshürden für AV-Entwickler, Fahrzeughersteller und Unternehmer zu senken, um den Weg zur fahrerlosen Autonomie zu demokratisieren.“
Herausforderung physischer KI
Die Möglichkeiten physischer KI bieten Entwicklerteams autonomer Fahrzeuge neue Chancen, den Weg zur vollständigen Autonomie zu beschleunigen. Um das Potenzial aktueller KI-Technologien jedoch effizient zu nutzen, sind mehrere Herausforderungen zu bewältigen. Zunächst müssen bestehende Fahrdaten optimal genutzt und durch synthetisch erzeugte, hyperrealistische Daten ergänzt werden, um KI-Modelle effektiv zu trainieren. Darüber hinaus erschwert die eingeschränkte Vorhersehbarkeit KI-gesteuerter Systeme eine sichere Implementierung – eine umfassende Validierung des gesamten AV-Stacks unter realitätsnahen Bedingungen ist daher unerlässlich. Schließlich braucht die Branche, von Flottenbetreibern über Entwickler bis hin zu Versicherern, einen unabhängigen, datengestützten Bewertungsrahmen, um die Sicherheit autonomer Fahrzeuge vor deren Einsatz im öffentlichen Raum objektiv und nachvollziehbar einschätzen zu können.
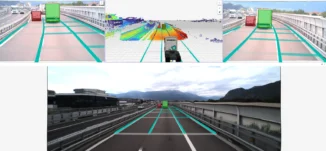
Das Tool Foretify trainiert KI-gestützte AV-Stacks, indem Trainingsdaten aus realen Fahrten automatisch kuratiert und durch generierte synthetische Szenarien ergänzt werden. Die Toolchain liefert zudem vielfältige Sensorsimulationsdaten, die mit realistishen Variationen aus NVIDIA Omniverse und Cosmos angereichert sind. Der KI-gestützte AV-Stack wird durch die Generierung großer Mengen realistischer synthetischer Daten validiert. Das steigert die Effizienz beim Erreichen eines optimalen Betriebssicherheits-Niveaus innerhalb einer definierten Operational Design Domain (ODD) um ein Vielfaches. Darüber hinaus verwendet Foretify ein datengestütztes Framework zur Sicherheitsbewertung, um die Performance realer und simulierter Fahrdaten zu analysieren und die Abdeckung zu messen. Das liefert unabhängige Belege für die Sicherheit des Systems.
Foretify hat kürzlich seine Integration mit dem NVIDIA Omniverse Blueprint für die Simulation autonomer Fahrzeuge, einschließlich NVIDIA Cosmos Transfer World Foundation-Modell und Videodaten-basierter Suche erweitert. Diese neu angekündigten Funktionen basieren auf physikalischen Erkenntnissen und verbessern die verhaltensgesteuerte Szenariengenerierung der Foretify-Plattform durch eine größere Vielfalt hinsichtlich Wetter, Beleuchtung und Geolokalisierung. Foretellix hat seine Plattform auch um neue Funktionen erweitert, mit denen sich das Verhalten autonomer Fahrzeuge noch gezielter analysieren lässt. Möglich wird dies durch die Integration von Cosmos-Suchfunktionen, die speziell auf Sensordaten ausgerichtet sind. Diese Weiterentwicklungen unterstützen das KI-basierte Training und die Validierung autonomer Fahrzeuge – und tragen so zu einer schnelleren Entwicklung und Marktreife bei.
Ziv Binyamini gilt als einer der Vordenker der Verifikationstechnologie. Vor seiner Rolle bei Foretellix war er als Corporate Vice President bei Cadence für das globale Geschäft mit Simulations- und Verifikationslösungen verantwortlich. In seiner Laufbahn bei Cadence, Verisity und Intel trieb er maßgeblich die Entwicklung moderner Verifikationsmethoden voran – darunter die Einführung der ersten Coverage-Driven-Verification-Ansätze sowie marktprägender Werkzeuge wie Specman für die Chip-Verifikation und Perspec für die HW/SW-Verifikation auf SoC-Ebene.
Die Foretellix Foretify/NVIDIA-Integration wurde bei den Automotive Testing Technology International Awards 2025 mit dem Preis „Simulation-Innovation des Jahres“ ausgezeichnet. (oe)