Der Beitrag stellt die Erweiterung des Standard SAE J1939 für CAN FD in Form des Data-Link-Layer vor und die damit einhergehende Einführung von Multi-Parametergruppen (Multi-PG). Danach geht der Autor, der als Product Management Engineer bei Vector Informatik tätig ist, auf den AUTOSAR Design-Workflow ein, bevor er sich den Basis-Software-Modulen von AUTOSAR für J1939 zuwendet. Es folgen Abschnitte über die Verwendung von Multi-PG in AUTOSAR und über noch fehlende AUTOSAR-Erweiterungen zur vollständigen Unterstützung von J1939. Trotzdem kommt der Autor in seinem Resümee zum Schluss, dass sich entsprechende CAN-FD-Systeme schon heute in AUTOSAR-Projekten mit geringem Aufwand realisieren lassen. (jr)
News
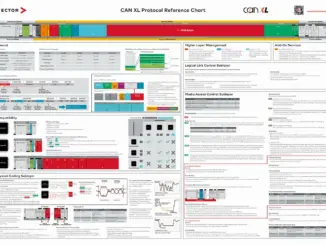
Neues Vector-Poster zur CAN-XL-Technologie
Mit dem Poster zur neuen CAN-XL-Technologie unterstützt Vector CAN-Technologieanwender. Es fasst wichtige technische Neuerungen kompakt und übersichtlich auf einen Blick zusammen.

News
PEAK-System: Universelles Steuergerät mit CAN-FD
Das Modul PCAN-MicroMod FD ECUPEAK-System ermöglicht die Integration kundenspezifischer Zusatzgeräte in Nutz- und Schwerlastfahrzeugen.

News
Vector: Präzises Testen und Absichern von LTE-V2X-Anwendungen
Das Interface ermöglicht das Senden und Empfangen von 3GPP-LTE-V2X-(PC5)-Frames und liefert über einen integrierten GNSS-Empfänger präzise Zeit- und Positionsdaten. In Kombination mit CANoe und CANalyzer.Car2x unterstützt es die effiziente Entwicklung und Absicherung von LTE-V2X-Steuergeräten bis zur Serienreife.