Wie lässt sich die zunehmende Komplexität der Ladekommunikation in softwaredefinierten Fahrzeugen beherrschen? Dieser Frage gehen Tobias Schneider und Michael Vick von Vector Informatik in einem aktuellen Fachartikel in der Elektronik Praxis nach. Darin stellen sie ein Architekturkonzept vor, das zeigt, wie sich Effizienz, Sicherheit und Performance in modernen Fahrzeugplattformen besser in Einklang bringen lassen.
Im Kern analysiert der Beitrag die Rolle des Electric Vehicle Communication Controllers (EVCC) innerhalb neuer, zonenbasierter E/E-Architekturen. Mit dem Übergang zum Software-Defined Vehicle steigen die Anforderungen deutlich: Funktionale Sicherheit, Cybersicherheit und kurze Reaktionszeiten müssen gleichzeitig erfüllt werden, während sich die Fahrzeugarchitektur zunehmend in Richtung zentraler Hochleistungsrechner entwickelt.
Die Autoren vergleichen zunächst drei mögliche Integrationsansätze für den EVCC: als Bestandteil des Onboard-Ladegeräts, integriert in ein Zonensteuergerät oder als verteilte Lösung. Der Fokus liegt im Folgenden auf einem verteilten Ansatz, der als besonders zukunftsfähig bewertet wird.
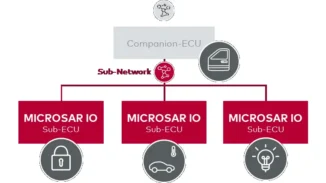
In dieser Architektur werden die Aufgaben gezielt aufgeteilt. Zeitkritische und sicherheitsrelevante Funktionen verbleiben auf einem Mikrocontroller in einem Gateway, während rechenintensive Prozesse wie Verschlüsselung, Zertifikatsmanagement und Protokollverarbeitung auf einen High-Performance-Computer ausgelagert werden. Diese Trennung bringt klare Vorteile: Sie ermöglicht nicht nur eine bessere Nutzung der jeweiligen Hardwarestärken, sondern auch schnellere Abläufe bei sicherheitsrelevanten Kommunikationsprozessen. Gleichzeitig können erste Schritte der Ladekommunikation bereits starten, bevor das Gesamtsystem vollständig hochgefahren ist.
Messungen aus dem Projekt zeigen, dass sich insbesondere die Dauer kryptografischer Prozesse deutlich reduzieren lässt. So verkürzt sich beispielsweise der TLS-Handshake um ein Vielfaches, was sich direkt positiv auf die Ladezeit auswirkt.
Der Ansatz hat jedoch auch Konsequenzen, wie die Auoren am Ende aufzeigen: Die Aufteilung auf mehrere Steuergeräte erhöht die Systemkomplexität und damit den Aufwand für Integration, Test und Absicherung. Mehr Kommunikationsschnittstellen und unterschiedliche Softwareplattformen müssen zuverlässig zusammenspielen. Auch Themen wie Updates und Variantenmanagement werden anspruchsvoller, bieten aber gleichzeitig neue Möglichkeiten durch zentrale Softwaredienste.
Insgesamt macht der Artikel deutlich, dass eine verteilte Architektur ein sinnvoller Weg ist, um die steigenden Anforderungen an die Ladekommunikation im softwaredefinierten Fahrzeug zu bewältigen. (oe)
Link zum Artikel (pdf, 3 Seiten)