Klassische Fahrtests, bei denen die Autos über Millionen von Kilometern auf Herz und Nieren getestet werden, sind für künftige Generationen automatisierter Fahrzeuge nicht mehr geeignet. Für eine belastbare Abschätzung des Sicherheitsrisikos wären inzwischen Milliarden von Kilometern erforderlich. Stattdessen setzen Standardisierungsgremien und Unternehmen der Automobil- und Zulieferindustrie auf virtuelle Testfahrten. In einer simulierten Verkehrsumgebung prüfen sie die Zuverlässigkeit aller Komponenten der Brems-, Lenk- und Sensorsysteme sowie der automatisierten Fahrfunktionen.
Im Projekt VIVID, kurz für „German Japan Joint Virtual Validation Methodology for Intelligent Driving Systems“, haben Wissenschaftler der TU Ilmenau gemeinsam mit den Partnern AVL List, Blickfeld, Continental, DLR Institut für Verkehrssystemtechnik, IPG Automotive, Karlsruher Institut für Technologie (KIT), Mercedes-Benz AG sowie der TU Darmstadt und der Hochschule Kempten die Entwicklung einer geschlossenen Simulationskette aus Umgebungsmodell, Sensormodell und Datenübertragung vorangetrieben.
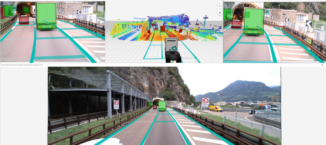
Das Forschungsteam am Thüringer Innovationszentrum Mobilität (ThIMo) konzentrierte sich dabei auf die Frage, wie sich die Leistungsfähigkeit und -grenzen von Fahrzeugradaren, wie sie später im Auto verbaut werden, in einer virtuellen Umgebung testen lassen. Im VIVID-Projekt führte das Forschungsteam die Sensortests mittels der Vehicle-in-the-loop-Methode durch, bei der ein reales Fahrzeug durch eine auf dem Computer realistisch nachgebildete Verkehrsumgebung navigiert. Das Team unter der Leitung von Prof. Matthias Hein, Projektkoordinator und Leiter des Fachgebiets Hochfrequenz- und Mikrowellentechnik am ThIMo der TU Ilmenau, testete dabei das Fahrverhalten des Autos in verschiedenen Verkehrssituationen. In der Virtuellen Straße – Simulations- und Testanlage VISTA bildeten die Forscher eine Vielzahl von Szenarien nach – etwa das Auffahren auf ein anderes Auto, Slalomfahrten oder das Erkennen von verlorenen Frachtstücken. Auch die Situation, in der plötzlich eine Person auf die Fahrbahn gerät, gehört zu den besonders kritischen Szenarien, die im Projekt untersucht wurden.
„Es ist uns gelungenen, Szenarien im Straßenverkehr realitätsnah in einer virtuellen Umgebung abzubilden und diese ohne Risiko zu erproben. Unsere Ergebnisse fließen nun direkt in die Forschung und Entwicklungsabteilungen namhafter Automobil- und Zulieferfirmen ein,“ erklärte Prof. Matthias Hein.
Das deutsch-japanische VIVID-Projekt wurde vom Bundesministerium für Bildung und Forschung (BMBF) als eines von vier ausgewählten Forschungsprojekten zum automatisierten und vernetzten Fahren mit 3,33 Millionen Euro gefördert.
Im japanischen Teilprojekt DIVP waren Toyota Motor Corp., Honda, Nissan, das Kanagawa Institute of Technology, Nihon Unisys, SOKEN, die Mitsubishi Precision Company, SOLIZE Engineering Corp., Sony Semiconductor Solutions Corp., Hitachi Automotive Systems, DENSO Corp., PIONEER Corp., Deloitte und SOLIZE Corp eingebunden.
Die Erkenntnisse aus dem Projekt werden nun in der Anschlussinitiative CONTROL des Arbeitskreises SafeTRANS zur Absicherung des automatisierten und vernetzten Fahrens aufgegriffen und gemeinsam mit Ergebnissen aus thematisch verwandten Projekten ausgebaut. (oe)