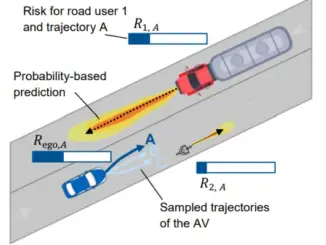
Vorgestellt wird ein ethischer Algorithmus für die Trajektorieplanung autonomer Fahrzeugen auf öffentlichen Straßen, der eine faire Risikoverteilung unter den Verkehrsteilnehmern gewährleistet.
Forschende der TUM haben eine Software für autonomes Fahren entwickelt, die das Risiko auf der Straße nach ethischen Gesichtspunkten fair verteilt, wobei das unterschiedliche Risiko der Verkehrsteilnehmenden berücksichtigt wird.