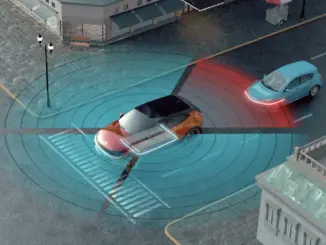
Madison Eaker, System Engineering Manager at Texas Instruments, starts her article by introducing the concept of zone architecture, in which communication, energy distribution and load control are organized according to the physical position in the vehicle and not according to function. The author then breaks down the different requirements for the bandwidth of a zone architecture, which range from under 10 Mbps to over 10 Gbps. Eaker advocates a combination of proven communication solutions such as CAN and LIN as well as new technologies such as Single Pair Ethernet (SPE).
In the subsequent second part, the author looks in more detail at the changes in terms of the requirements and architecture of communication that arise over time as a result of the assumed gradual introduction of the zone architecture.
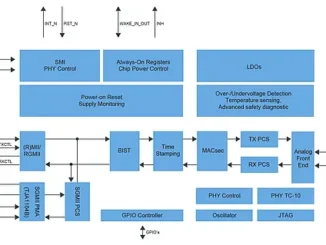
The third and final part of the article deals with the role of Ethernet PHYs in a zone architecture when sending and receiving high-speed data. The role of PHYs also includes addressing many of the problems associated with Ethernet as the backbone of in-vehicle cabling, such as poor signal quality. In this section, the author also highlights the features that Ethernet PHYs must have or should have in order to be suitable for use in cars. (jr)