Die Bewertung von autonomen Fahrfunktionen wird immer wichtiger. Sowohl die Hardware als auch die Software müssen strengen Sicherheitsprüfungen unterzogen werden, um ihre Zuverlässigkeit und Sicherheit zu gewährleisten. Diese Prüfungen berücksichtigen verschiedene Fahr- und Umweltbedingungen. Ein zentraler Punkt ist dabei der SOTIF-Standard (Safety of the Intended Functionality) nach ISO 21448. Dieser Standard definiert, wie eine Funktion entwickelt, geprüft und validiert werden muss, um als sicher zu gelten.
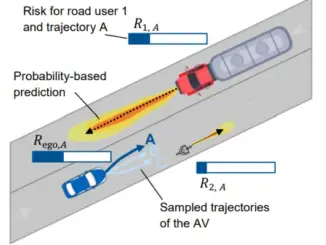
In diesem 7-seitigen, englischsprachigen Beitrag des Fraunhofer EMI, der anlässlich der 33rd European Safety and Reliability Conference veröffentlicht wurde, werden die Ausfallwahrscheinlichkeiten der einzelnen Komponenten eines autonomen Fahrzeugs betrachtet. Dadurch lassen sich Rückschlüsse auf die Ausfallwahrscheinlichkeit des gesamten Systems ziehen und mögliche Schwachstellen erkennen. Dabei werden die relevanten Faktoren und typischen Ausfallmodi identifiziert und aktuelle Daten aus Fachveröffentlichungen zusammengetragen. (oe)